

Awtomatiki robot karton gutusy / Gaplamak palletizatoryny gysmak
Wideo
Düşündiriş
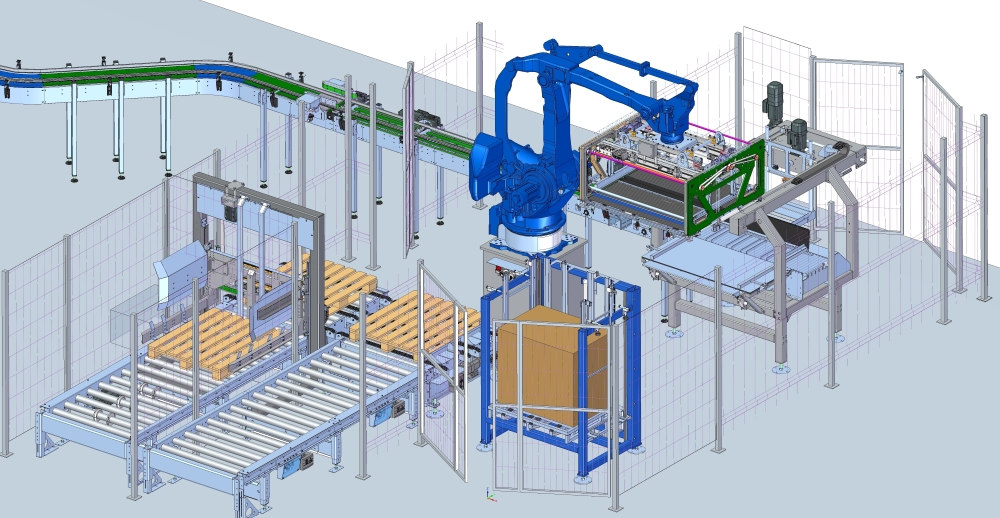

Robot paletizatory, önümiň kartona, dolanyşyk gutusyna, sumkalara we önümiň beýleki düzgünlerine ýüklenendigi, konweýer liniýasynyň üsti bilen ýerleşdiriler we ýerleşdiriler;10-12 sany arassa ýerleşdirilen paletler forklift bilen awtomatiki palet maşynyna ýerleşdirilýär we enjam paletleri yzygiderli bölýär we ýerleşdirmek we paletlemek üçin paletirleme ýerine iberýär.Robot önümi ýörite armatura arkaly ele alar we paletde öňünden goýlan ýerine laýyklykda palet konweýer liniýasy palletizasiýa palet çykaryjy enjamlary gutarandan soň, forklift çeňňegi bilen çyzykdan çykar.Wholehli proses adam gatyşmazdan awtomatiki usulda tamamlanýar.Gurnama liniýasyny ulanmak üçin amatly, zähmeti ep-esli azaldyp, zähmet güýjüni peseldip biler.Speedokary tizlikli, durnukly we kosmos tygşytlaýyş dizaýny, has çalt we has köp ýer tygşytlamak düşünjesini kabul ediň.Bir maksatly köp maksatly, çalt düzediş, gaplanan önümleri çalyşmak we aladalanmak hökman däl.
Ulanyş gerimi: gasynlanan karton, plastmassa guty, çelek gaplamak, sumka gaplamak we ş.m.


Enjamlaryň düzümi: önümi iberiji liniýa, ýerleşdiriş çyzygy, paletleşýän robot, esas, armatura, palet paýlaýjy maşyn, palet geçiriji liniýa, elektrik dolandyryş ulgamy we howpsuzlygy goramak ulgamy we ş.m.
Aýratynlyklary
1. Toplaýyş ýeriniň takyk we durnukly bolmagyny üpjün etmek üçin ABB ýa-da KUKA ýa-da yaskawa gaplaýjy robotlary ulanmak.
2. Dürli palletizasiýa proseduralaryny öňünden kesgitläp bolýar, üýtgeşik aýratynlyklary sensor ekranynda islendik wagt bölekleri çalyşmazdan çagyryp bolýar.
3. Çeýe ulanmak, robot bir wagtyň özünde palletizasiýa, güýçli utgaşyklyk bilen önümleriň 1-4 dürli aýratynlyklaryna laýyk bolup biler.
4. Palet kitaphanasynyň kuwwaty uly, 10-12 boş palet ýerleşdirip biler, paletiň awtomatiki üpjünçiligini amala aşyryp biler.
5. Enjamlaryň durnuklylygyny kesgitlemek üçin halkara birinji derejeli marka elektrik böleklerini ulanmak.
6. Arassa, owadan we täsirli;Zähmeti ep-esli azaldyp biler.
7. Adam-maşyn gepleşiklerine ýetmek üçin duýgur ekran operasiýasy, önümçiligiň tizligini, näsazlygyň sebäbini we ýerleşişini, awtomatlaşdyrmagyň ýokary derejesini görkezip biler.
8. PLC gatlak gatlaklarynyň sanyny, palet üpjünçiligini we kartonlaryň zyňylmagyny gözegçilikde saklamak üçin programmirläp bolýar.
9. Dolandyryş ulgamy: el bilen, awtomatiki iş tertibi bilen, sensor ekrany, tutuş maşyn işleýiş funksiýasy bilen sensor ekrany.
10. Enjamlaryň işleýiş prosesine hakyky wagtda gözegçilik.Workhli iş ädimleri öz-özüni anyklamak funksiýasy bolan datçikler tarapyndan kesgitlenýär.Islendik ýalňyşlyk ýüze çykanda enjam awtomatiki usulda togtadylýar, duýduryş çyrasy ýakylýar we operasiýa ekranynda säwlik görnüşi görkeziler.
11. Garaşsyz elektrik dolandyryş şkafy, sowadyjy fanat bilen dolandyryş gutusy, floresan rozetka.
12. linehli çyzyklar sim bilen üpjün edilýär we rozetka ýeri şlang bilen goralýar.
13. Kabeller çyzyk belgileri bilen bellik edilýär we terminallar gysylýar.
14. Robotyň ýörite çeýe kabelini ulanyp, kabeliň özara hereketini amala aşyrmak üçin enjamlar.
Bütin enjam howpsuzlyk gapysy bilen enjamlaşdyrylandyr, gapy açylanda enjam işgärleriň howpsuzlygyny üpjün etmek üçin işlemegini bes edýär.



Tehniki parametr
| Görnüşi | XYMD-12 / R. |
| Güýç çeşmesi | 380V 50HZ 20Kw |
| Ulanylýan önüm | Multfilmler, dolanyşyk gutulary, sumkalar, zynjyrly önümler we ş.m. |
| Önümiň ölçegi | Zerur bolanda düzüň |
| Ulanylýan palet ululygy | L1000 ~ 1200 * W1000 ~ 1200 * H120 ~ 150mm (Hakyky palet dizaýnyna görä) |
| Tertibe tertibi | Zerur bolanda düzüň |
| Boýuň beýikligi | 001800mm (Robot saýlamak talaplara laýyklykda amala aşyrylyp bilner) |
| Tizlik | Bir minutda 10-12 urgy (Ackygyndy görnüşiniň ýerleşdirilişine görä tutmak has köp bolup biler) |
| Howa basyşy | ≥6 Kg / cm² |
| Gaz sarp edilişi | 0.2m³ / min |
| Önümiň transport beýikligi | 900mm (Zerur bolanda düzüň) |
| Palet beýikligi | 600mm (Zerur bolanda düzüň) |
| Palet transport tertibi | Palet gurluşyna görä deprek görnüşi, zynjyr görnüşi, zynjyr plastinka we ş.m. ulanylyp bilner |
| Maşyn demensiýasy | Hakyky ýerleşişine görä |
| Maşynyň agramy | 2000Kg |
| Enjam materiallary | Esasy material uglerod polat sepýän plastmassa, material bilen gatnaşygy poslamaýan polatdyr (Zerur bolanda düzüň) |
| Enjamyň konfigurasiýasy | (Zerur bolanda düzüň) |

